

Developing a 7 kW Wireless EV Charging System with AUTOSAR Software
by Dr. Vasudevan Muruganandam.

As OEMs and Tier-1 suppliers race to electrify vehicle platforms, the pressure to deliver safe, efficient, and standards-compliant wireless EV charging systems has never been higher. This case study breaks down how Hinduja Tech designed and validated a production-grade 7 kW wireless EV charging solution with AUTOSAR software and what it takes to get it right.
Why Wireless Charging System Software Development Demands a New Engineering Approach
Fast charging is well into its maturity curve. Wireless power transfer is not. Delivering 7 kilowatts of power safely through an air gap under real-world misalignment, interference, and environmental conditions requires coordinated engineering expertise across power electronics, communication stacks, functional safety frameworks, and embedded software layers simultaneously.
This is not a hardware challenge alone. The software architecture is where real complexity lives. And for automotive-grade systems, that means building on AUTOSAR, the standard for vehicle software development for OEMs and Tier-1 level suppliers.
Project Scope: What We Set Out to Build
The objective was clear: develop and validate a 7 kW wireless charging system that fully adheres to the AUTOSAR software architecture while meeting industry compliance standards, including CISPR 25 and ISO 26262 (functional safety).
The system needed to work across varying positional offsets between the primary and secondary coil, a real-world condition that causes most wireless charging systems to fail in field deployments. Power transmission had to remain within safe parameters at every operating point.
Key Engineering Challenges
Translating those objectives into a production-ready system surfaced five interconnected challenges that shaped every architectural decision.
1. Dynamic Coil Misalignment and Power Stability: Vehicles rarely park with perfect precision. Lateral and longitudinal offsets between the primary and secondary coils degrade coupling efficiency and can cause voltage fluctuations or abrupt power loss. The software had to continuously monitor alignment and adjust transfer parameters in real time without disrupting the charging session or triggering false faults.
2. Electromagnetic Interference Within CISPR 25 Limits: Operating at 7 kW generates substantial electromagnetic emissions. Meeting CISPR 25 limits required tight co-design between power electronics and electromagnetic compatibility (EMC) software control loops, where any switching irregularity translated directly into spectral noise that threatened compliance margins.
3. Real-Time Power Control Within AUTOSAR Abstractions: Standard AUTOSAR software component abstractions are not natively suited to microsecond-level power regulation. Implementing high-frequency control loops within the layered architecture without violating its abstraction model demanded careful use of complex device drivers to handle hardware-proximate operations while preserving portability.
4. Functional Safety Across a Distributed Architecture: With the transmitter and receiver physically separated and communicating across an air gap, coordinating fault detection and safe-state transitions under ISO 26262 required a safety architecture robust to communication latency, partial failures, and degraded operating modes.
5. V2G Protocol Compliance and Secure Negotiation: Supporting bidirectional vehicle-to-grid (V2G) interactions per ISO 15118 added meaningful integration complexity, secure protocol negotiation, session management, and dynamic power scheduling, all of which had to be layered onto the core AUTOSAR communication stack reliably.
Our Solution: AUTOSAR-Based Software Architecture
Our engineering team structured the wireless charging system software around a full AUTOSAR SWC Application Layer, communicating over the RTE (Runtime Environment) with a robust Basic Software (BSW) configuration. Here is how the key technical challenges were addressed:
Power Control: Used Complex Device Driver (CDD) for precise, real-time power control and transfer regulation without breaking AUTOSAR abstraction layers.
Sensor Integration: Integrated position and proximity sensors via AUTOSAR MCAL for deterministic reads and clean hardware abstraction across Electronic Control Unit (ECU) variants.
CAN & LIN Communication: Implemented CAN and LIN stacks for vehicle network integration, enabling real-time status exchange and power control feedback with full bus management.
Safety Module: Incorporated functional safety using AUTOSAR’s Safe State Manager (SSM) for fault detection and safe-state transitions aligned to ISO 26262 ASIL requirements.
Wireless Data Exchange: Developed a communication protocol between the transmitter and receiver unit for alignment reporting and dynamic charging control across the air gap.
V2G Communication: Enabled Vehicle-to-Grid (V2G) interactions per ISO 15118 using AUTOSAR communication stack, supporting bidirectional power sessions and secure protocol negotiation.
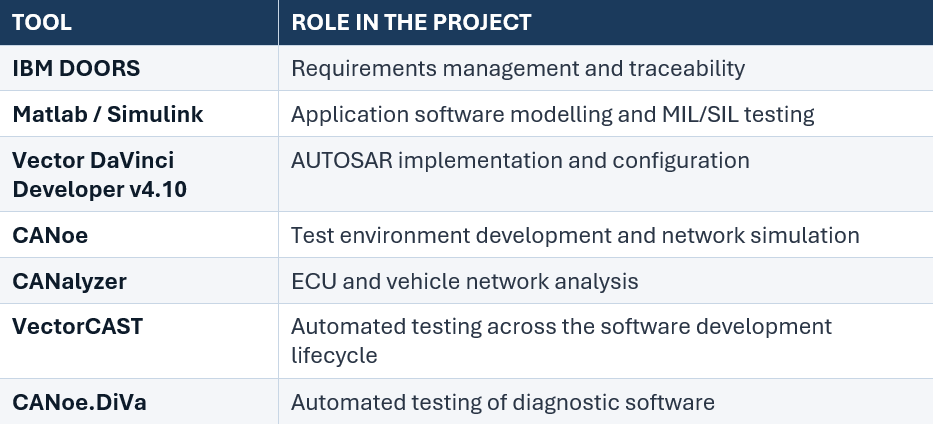
Tools Used in Software Development & Validation
Delivering a production-grade result in embedded software development for automotive requires a toolchain not just for development but also for verification, analysis, and compliance.
What This Project Means for OEMs and Tier-1 Suppliers
Wireless charging is one of the defining convenience and infrastructure challenges of the EV era. Getting the hardware right is table stakes. Getting the wireless EV charging system software development right with proper AUTOSAR architecture, robust CAN and LIN communication, compliant embedded software engineering, and ISO 26262 safety integration is what separates production-ready systems from prototype-grade ones.
For OEMs and Tier-1 suppliers building the next generation of electrified platforms, the message is clear: software architecture decisions made early in the program directly determine how safely, quickly, and cost-effectively you can validate and homologate your wireless EV charging systems.
Why Choose Us for Wireless EV Charging System Software Development
For organisations operating under tight homologation timelines and strict regulatory requirements, the choice of engineering partner directly determines programme success. At Hinduja Tech, our engineers bring deep, production-proven AUTOSAR expertise, configuring, integrating, and validating compliant software architectures on live ECU programmes rather than just in theory. By taking end-to-end ownership across the full V-model from requirements and MIL/SIL modelling through to AUTOSAR implementation and automated testing, we provide a single accountable team that ensures complete traceability and evidence of compliance. The 7 kW wireless charging system in this case study stands as a practical testament to this capability. This unique combination of technical depth, rigorous toolchain discipline, and cross-standard expertise is why leading organisations trust us with their most demanding electrification programmes.
If you are scoping a wireless EV charging project or evaluating embedded software development partners for your next EV platform, reach out to us at info@hindujatech.com.
About Author

Dr. Vasudevan Muruganandam
Subscribe to Email Updates
FOLLOW US ON
LinkedIn @Hinduja Tech Limited
Categories
- Body Engineering (5)
- Digital Services (8)
- Electric & Future Mobility (10)
- Product Engineering Services (3)
- RelAI (1)
- SAP (3)
- Thermal Management (1)
- Commercial Vehicle (2)
- Industrial simulation (3)
- Supply chain engineering (1)
- Ergonomics (1)
- Human simulation (1)
- Automotive (4)
- Manufacturing (3)
- General (1)
- Sustainable (8)
- Engineering (13)
- Innovation (2)
- Electronics (1)
- CAE (6)
- Digital Technology (1)
- Supply Chain Management (4)
- vehicle electronics & software (5)
- vehicle engineering (2)
- Mobility (5)